|
I am an Assistant Professor (Maître de Conférences) at Université de Bourgogne (UB), working in the "Laboratoire Interdisciplinaire Carnot de Bourgogne" (ICB, CO2M team), a joint research unity between the CNRS and UB in Dijon. My teaching activies are in the Department of Robotics (Le Creusot) of the engineering school of UB (ESIREM). I am also an Associate Member of the TANGRAM team at INRIA Nancy/LORIA. Previously, I was a member of the "Laboratoire d'Imagerie et Vision Artificielle" (ImViA) until May 2023. I did my PhD at INRIA Sophia Antipolis/France and at Ecole des Mines de Paris / Université Paris Sciences et Lettres, where I was advised by Dr. Patrick Rives. Then, I was a post-doctoral researcher in the CNRS I3S laboratory, in the ACENTAURI / CHORALE group at INRIA and with the VeRLab laboratory at Universidade Federal de Minas Gerais/Brazil, with whom I maintain tight research collaborations. My research interests lie in Computer Vision, Machine Learning and Robot Vision, more specifically in the topics of 3D vision, geometric deep learning, human motion analysis, video prediction, and RGB-D image analysis and processing (perspective, omnidirectional). Publications / Collaborators / Software / Google Scholar / Contact |


|
|
|
|
|
|
|
|
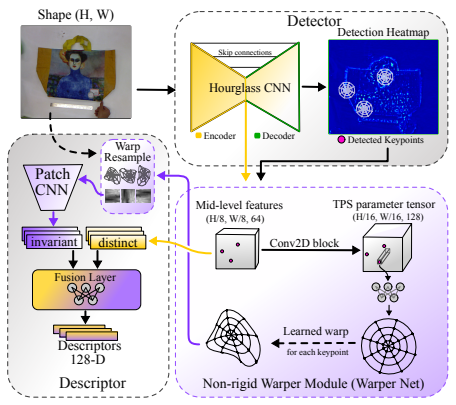
This paper proposes a learning-based keypoint detection and description approach to describe images of rigid and non-rigid objects. Both detection and description of keypoints are learned jointly and they are done simultaneously at test time. |
|
|
|
|
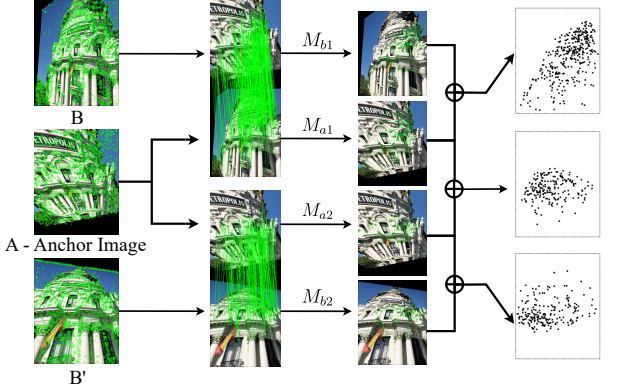
In this paper, we present a novel detection method for locating confident keypoints on images affected by non-rigid deformations. Our detector learns to locate keypoints given supervision from visual correspondences, obtained by matching annotated image pairs with a predefined descriptor extractor. |
|
|